研究概要
ロボットなどメカトロニクスシステムは、周囲や自分の状況を調べるセンサ、センサの情報を認識・判断するコンピュータ、判断結果に基づき動きを作り出すアクチュエータから構成され、それらを総合的にコミュニケーション,インテグレーションすることで成立します。 速度や位置、障害物までの距離など「はかる」あるいは扱いたい対象物を「見つける」ことは機械に知性を与えます。 対象によって何を「はかる」ことが大事かを基盤として、制御、AI関連技術を応用して、福祉分野、産業分野、農業分野など、人の生活・作業支援に資する研究にチャレンジします。

現在の研究テーマ
施設内車いす自動走行化ロボット
介護施設では,利用者の居室から食堂までの移動介助が職員の負担の一つとなっています.
導入コストを考慮し,施設に一般的に導入されている手動の車いすに手軽に装着して,
牽引,自動走行させるロボットについて研究しています.

視覚障がい者支援機器
視覚障害者(特に中途失明の方)は外出する際,多くの困りごとを抱えています.白杖,盲導犬,ガイドヘルパーのメリット・デメリットを補完できる新たな選択肢として,屋外での自由な移動を支援する機器について研究しています.


作業用移動ロボットのリスク対策
農業ロボットなど屋外で作業する移動ロボットを制御するために,5Gのように高速・低遅延の通信回線を使用して計算コストの高い処理をクラウド上で処理する研究が進んでいます.
本研究では通信喪失時および通信復旧時の自己位置推定に起因する危険事象を軽減させる安全なロボットの動作の実現方法について研究しています.

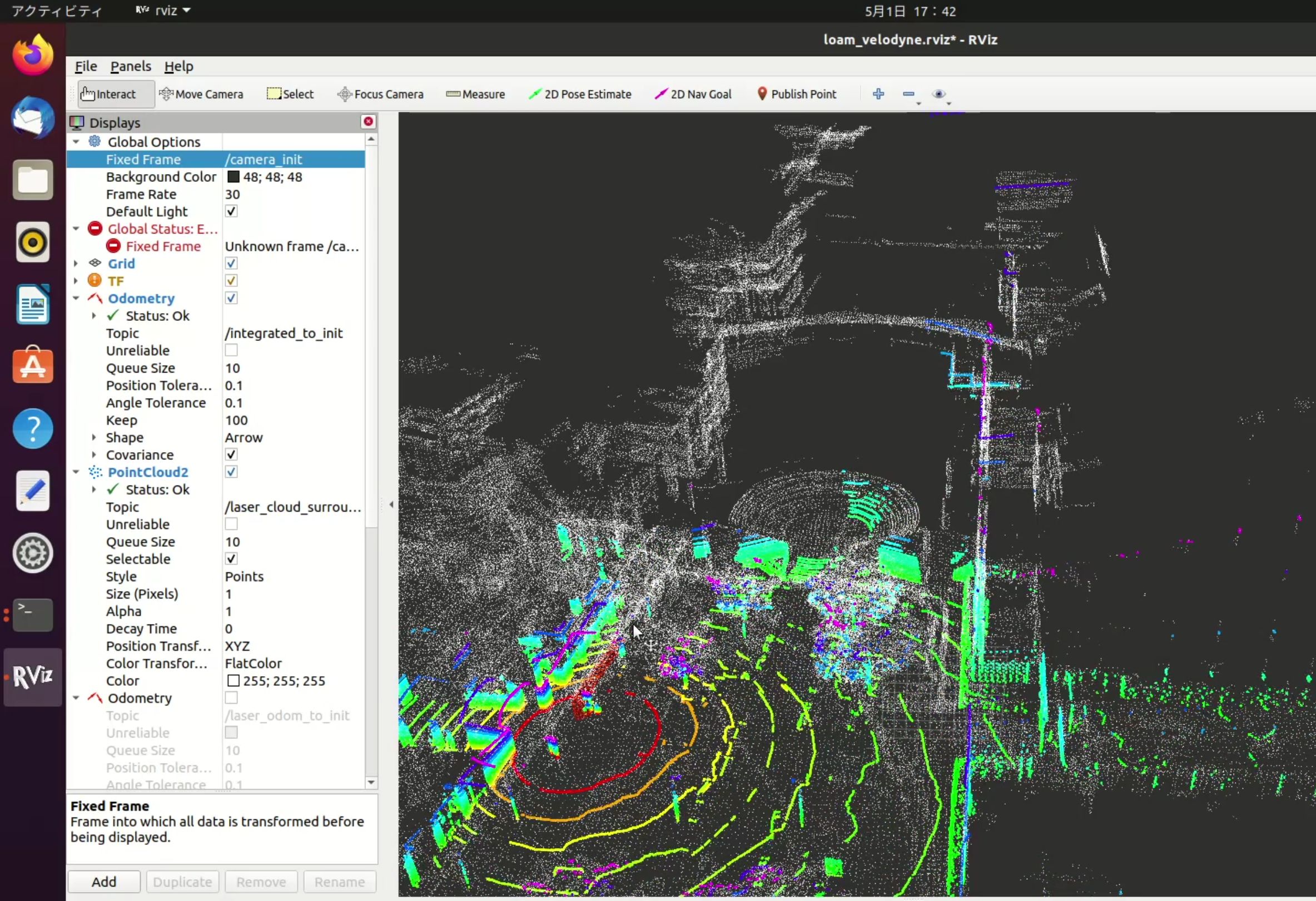
移動ロボットの精度測定システム
宅配ロボットや配膳ロボットなど,ロボットが私たちと同じように道路,通路を通行する時代になり,安全性の担保が急務となっています.
安全性の担保にあたっては,ロボット自身が推定している自己位置の確からしさを外部から測定し評価する必要があります.
屋内ではモーションキャプチャを使用して位置と姿勢を測定できますが,
屋外ではトータルステーション(レーザトラッカ)等を使用して,位置のみは測定可能であるものの,時々刻々の姿勢までは測定できません.
本研究では,画像と距離計,高精度角度計測技術に基づく屋外での移動ロボットの位置,姿勢を測定するシステムの開発に取り組んでいます.
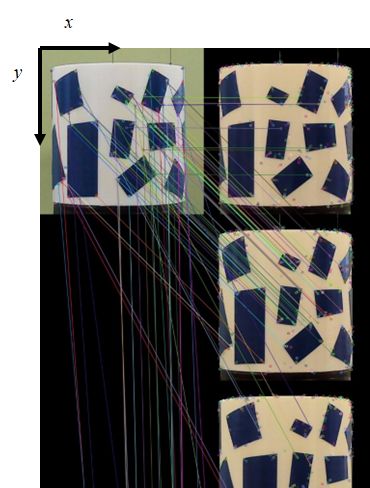

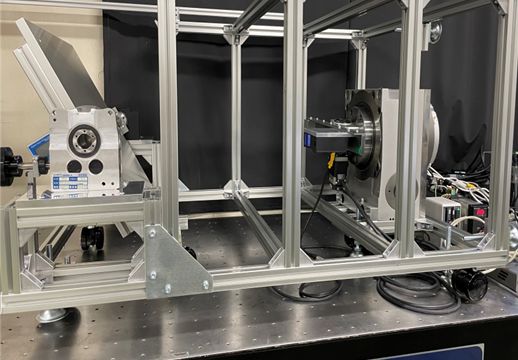
超精密姿勢計測に関する研究
航空機用部品など複雑な形状の部品を加工するには,加工装置のテーブルの精度が重要となります. 本研究では,レーザ距離計を環状に走査した計測データを解析することにより、テーブルの姿勢を精密に計測します.
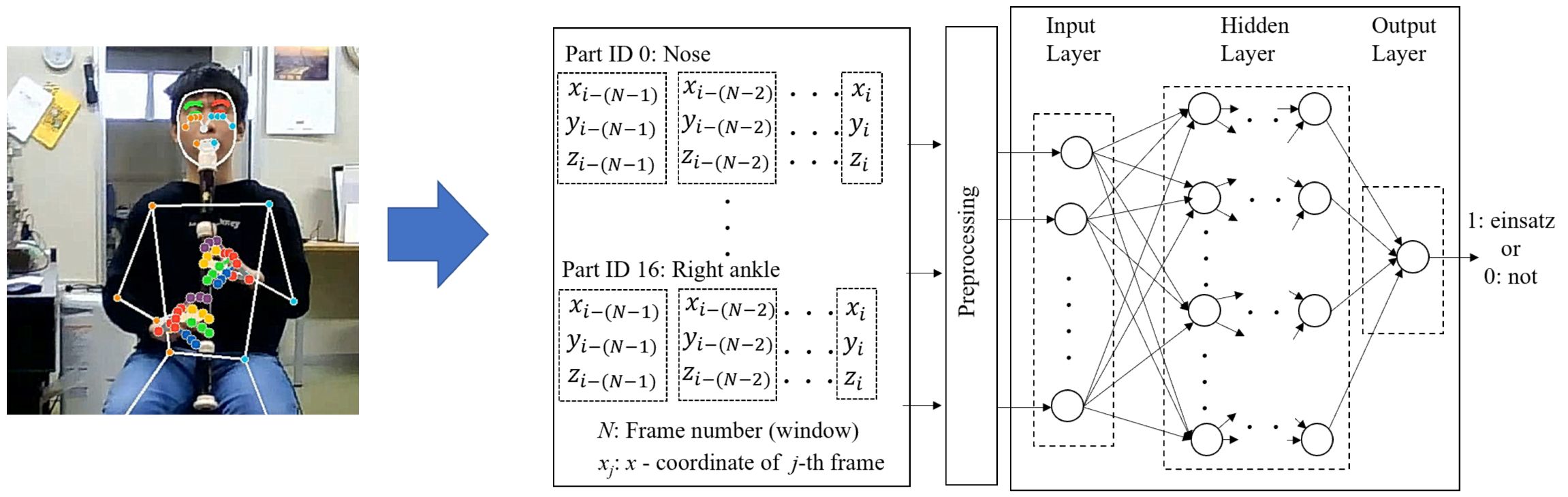
人とロボットの高度な協調作業に関する研究
少子高齢化社会を背景に,製造業向けの協調作業ロボットの研究,開発,一部実用化が進んでいますが, 私たちは高度な協調作業として,人とロボットによるアンサンブルに着目しています. 動作を先読みして合わせる制御技術の知見は,単に音楽演奏のみならず産業用ロボットのシームレスなティーチングや協調作業など幅広く展開が可能になると考えています.
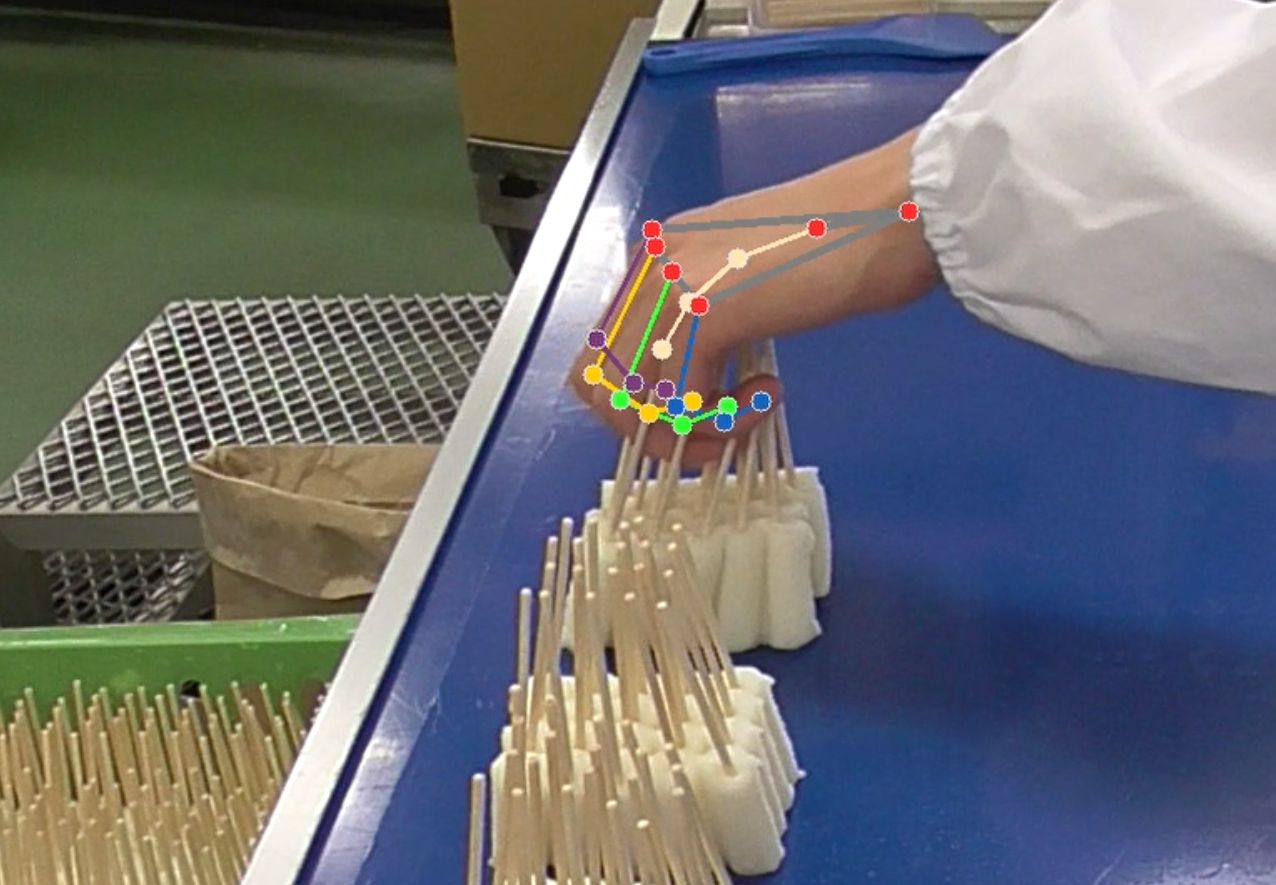
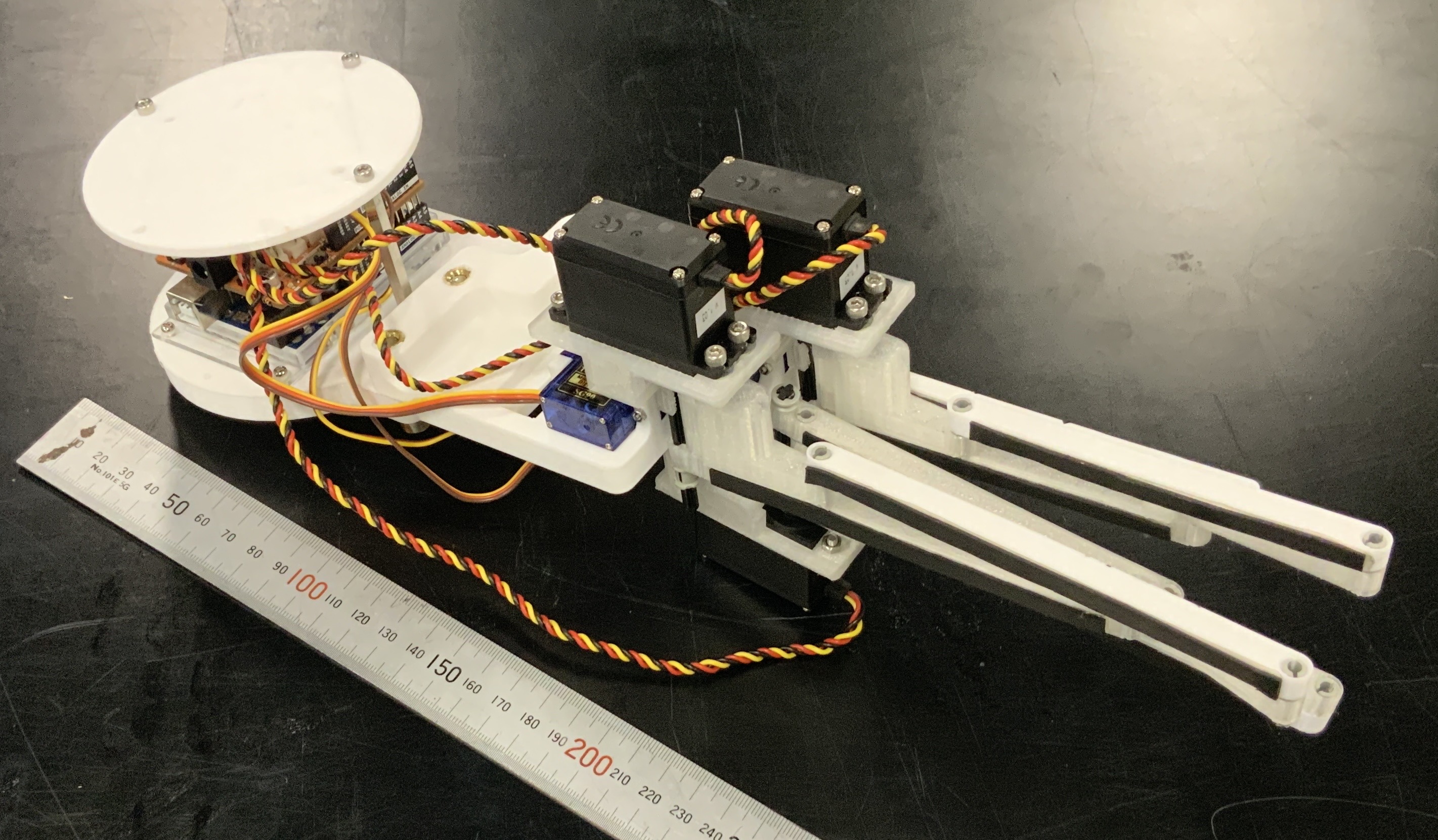
剛体・柔軟体複合物体の把持・操作に関する研究
製造業で剛体の把持,搬送のみに使用されていたロボットハンド(グリッパ)が, 様々な分野でのロボット活用が期待されるにつれ,食品などの柔軟体の把持が求められるようになりました. 今後,剛体,柔軟体の性質が混在する物体について,把持,操作するニーズが高まると予想されます. 本研究では,法多山厄除団子(串団子)をターゲットとして取り組んでいます.
過去の研究テーマ
段差走行車椅子
近接覚センサ
光学式6軸力覚センサ
光磁気式ロータリエンコーダ
脚車輪型ロボット
階段認識アルゴリズム
電動アシストシルバーカー
小型切削移動ロボット